Turtlebot SAR
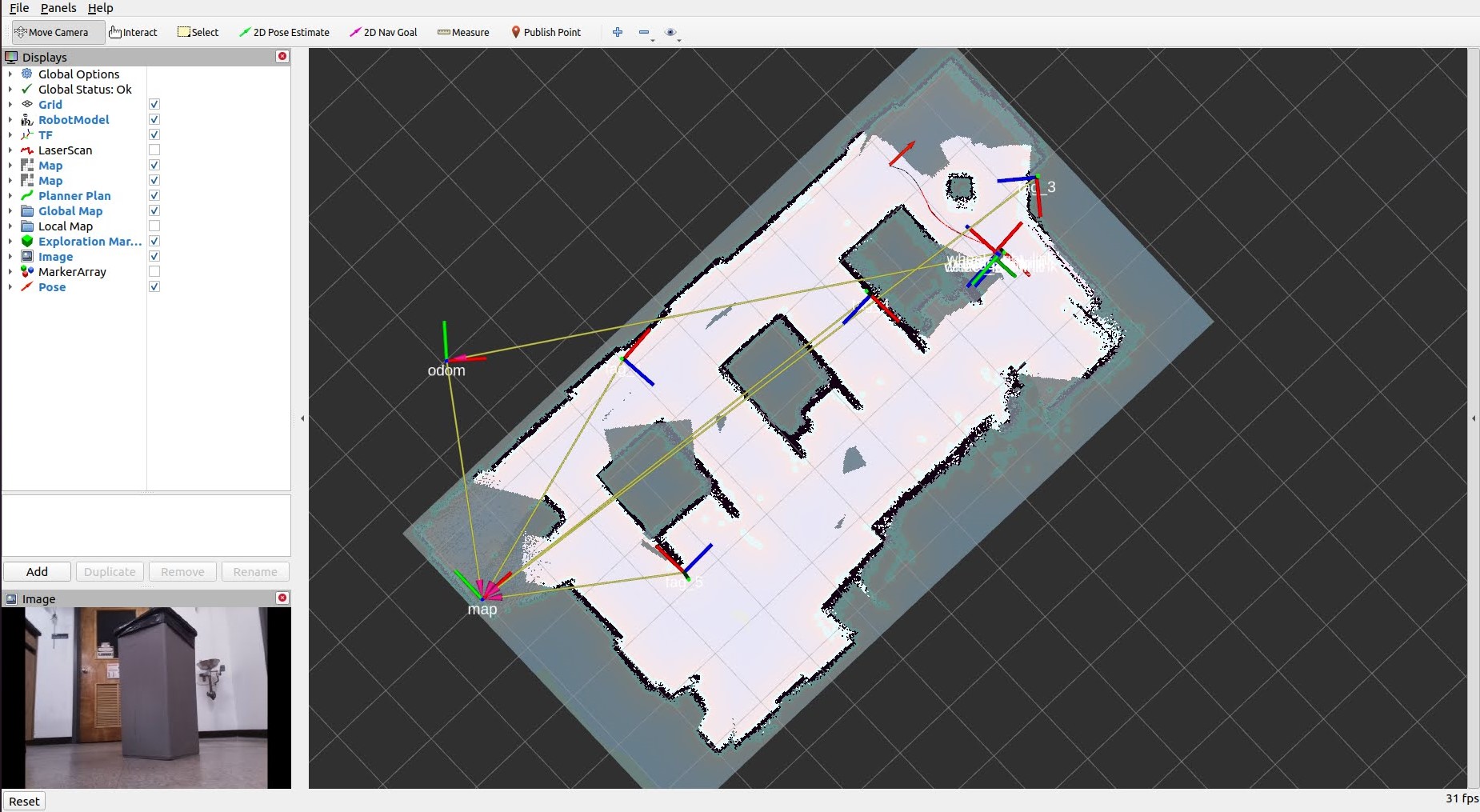
Reducing risks in disaster response is imperative to saving lives not only of victims but also of response crews. For this project, I led a group of graduate students at Northeastern University to design of a mobile robotic system capable of exploring unknown environments in search of potential victims. The final system utilized a turtlebot running ROS, SLAM provided by slam_toolbox, and a custom masked exploration algorithm to explore a room and discover multiple visual markers.