Autonomous Tunnel Drone
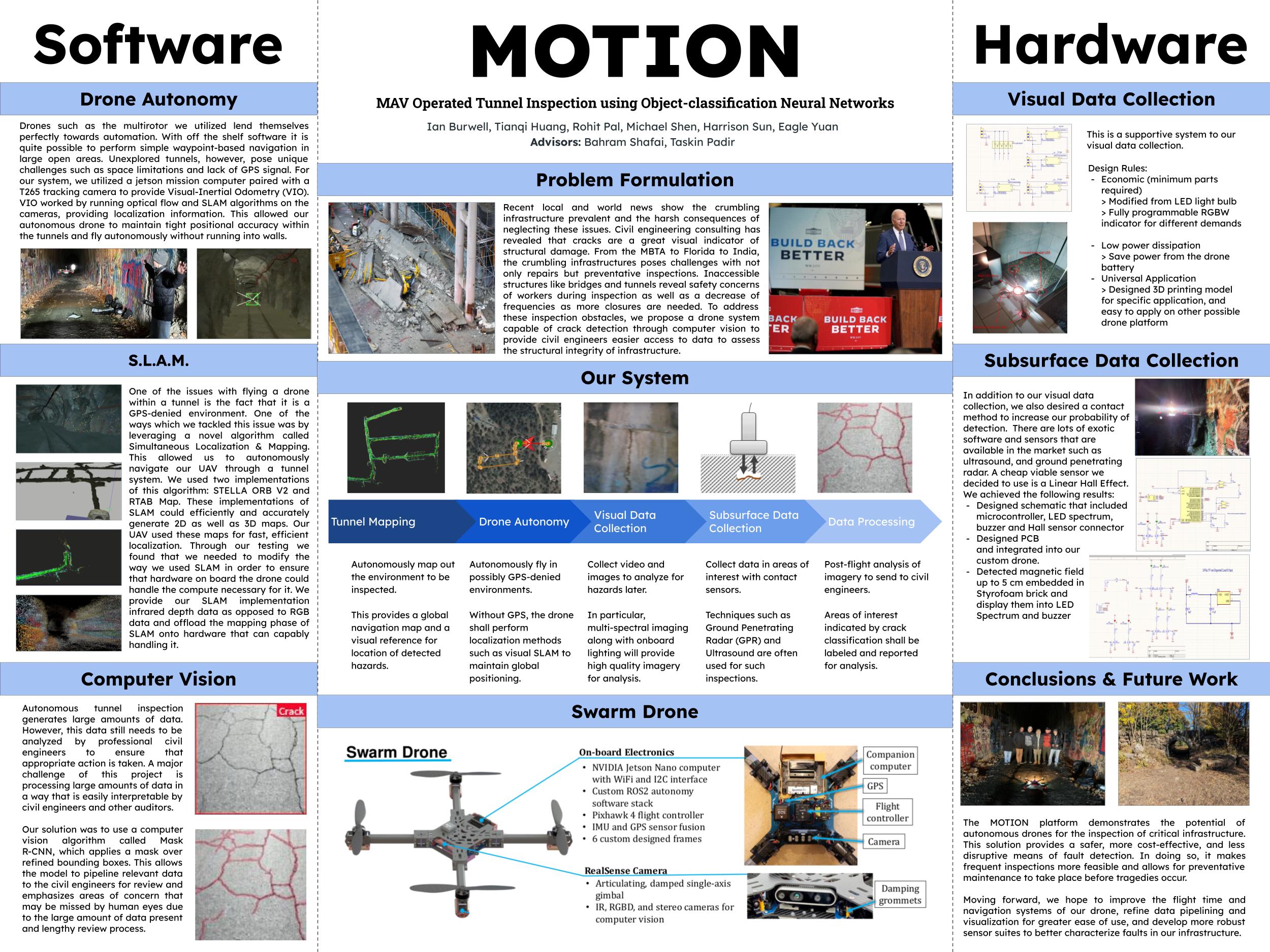
Recent infrastructure collapses, such as the MBTA’s Government Center collapse, have highlighted the importance of safe and efficient methods for evaluating critical infrastructure. To address this issue, I worked with a stellar team of my engineering peers at Northeastern University to developed a small Unmanned Aerial System that can detect and evaluate the risks associated with hazardous fractures within tunnel walls. In our proposed solution we leveraged Region-based Convolutional Neural Networks (R-CNN) for an applied mask in computer vision, Simultaneous Localization And Mapping (SLAM) for global navigation in GPS-denied tunnels, and an integrated sensor suite for visualizing and interpreting crack integrity while maintaining flight capabilities in remote environments. With these techniques, we had the capability to deploy a tool that provides insightful analysis of various civil infrastructure evaluations to expert civil engineers. With the developed system we hope to provide the industrial and academic communities with a prototyped system that can help mitigate the impact of cracks in vulnerable infrastructure.